✅ MMDVMHost 実装手順書(Raspberry Pi Zero 2 W + STM32_MMDVM_HS_HAT)
2025年5月30日
2025年6月1日
📘 MMDVMHost 実装手順書(受信専用・Pi Zero 2 W + STM32_MMDVM_HS_HAT GPIO接続)
🧱【前提環境】
- SBC:Raspberry Pi Zero 2 W
- OS:Raspberry Pi OS Legacy Lite (32bit)
- モデム:STM32_MMDVM_HS_HAT Rev1.7(GPIO接続)
- DMR ID:4401505
- 周波数:438.710MHz
- UARTポート:
/dev/ttyAMA0 - ユーザー名:
pi-star
🧩【ステップ1】Raspberry Pi のロケール・タイムゾーン・キーボード設定
🇯🇵 ロケール(Locale)の設定
💡 解説
- ロケールは、OSの表示言語や日付・時刻の表記、文字コードの形式などに影響する設定です。
- 日本向けの推奨設定:
- 言語:
ja_JP.UTF-8 - タイムゾーン:
Asia/Tokyo - キーボード:
Japanese(JIS配列)
- 言語:
🖥️ 設定コマンド
$ sudo dpkg-reconfigure locales
- 一覧から
ja_JP.UTF-8 UTF-8にスペースでチェック - デフォルトロケールとして
ja_JP.UTF-8を選択
確認コマンド:
$ locale
例:
LANG=ja_JP.UTF-8
LANGUAGE=
LC_ALL=
⏰ タイムゾーンの設定
$ sudo timedatectl set-timezone Asia/Tokyo
⌨️ キーボード設定(任意)
$ sudo dpkg-reconfigure keyboard-configuration
選択例:
- キーボード種類:Generic 105-key (Intl) PC
- キーマップ:Japanese
🛠【ステップ2】依存パッケージのインストール
💡 解説
このステップでは、MMDVMHost のビルドに必要なツールやライブラリをインストールします。
git:GitHub からソースコードを取得するために使用build-essential:C/C++ のビルド環境(make, gcc など)をまとめて導入libusb-1.0-0-dev:一部 USB 接続型のモデムやツールと連携する際に必要になる場合あり
🖥️ 実行コマンド
$ sudo apt update
$ sudo apt install -y git build-essential libusb-1.0-0-dev
🔌【ステップ3】UARTポート(ttyAMA0)専用化の設定
💡 解説
Raspberry Pi の GPIO UART(ttyAMA0)は、デフォルトで Bluetooth 機能やシリアルログイン用の getty サービスと共有されているため、それらを停止・無効化して MMDVM モデム専用にする必要があります。
hciuartとbluetoothサービスが有効だと UART ポートを使用してしまうserial-getty@ttyAMA0.serviceが起動していると、ログイン用プロンプトが ttyAMA0 に表示され競合するmaskはサービス起動を完全に禁止(disableより強力)
🖥️ 実行コマンド(root 権限)
# sudo systemctl disable hciuart
# sudo systemctl stop hciuart
# sudo systemctl disable bluetooth
# sudo systemctl stop bluetooth
# sudo systemctl disable serial-getty@ttyAMA0.service
# sudo systemctl stop serial-getty@ttyAMA0.service
# sudo systemctl mask serial-getty@ttyAMA0.service
💾【ステップ4】config.txtの編集
💡 解説
Raspberry Pi のブート設定ファイル /boot/firmware/config.txt を編集して、UART を有効化し、Bluetooth を無効化します。
enable_uart=1によって UART をアクティブにするdtoverlay=pi3-disable-btによって Bluetooth 機能を完全に停止
🖥️ 実行コマンド
# sudo nano /boot/firmware/config.txt
以下を確認・追加:
enable_uart=1
dtoverlay=pi3-disable-bt
保存して再起動:
# reboot
🧰【ステップ5】MMDVMHostのダウンロードとビルド
💡 解説
MMDVMHost は Jonathan Naylor 氏によって開発されたデジタルボイスモデム制御ソフトウェアです。GitHub から取得し、ローカルでビルドします。
make -j2は Raspberry Pi Zero 2 W のようなリソースの限られたデバイスで安全に並列ビルドを行うための指定です。-j4だとビルド中にフリーズする場合があります。
🖥️ 実行コマンド
$ cd ~
$ git clone https://github.com/g4klx/MMDVMHost.git
$ cd MMDVMHost
$ make -j2
📝【ステップ6】MMDVM.iniファイルの設定
💡 解説
MMDVMHost の設定ファイル MMDVM.ini を編集して、受信専用・DMR用として必要なパラメータをセットします。
🔍 注目・必須ポイント:
[General]のCallsignやIdはライセンスに基づいた正確な情報を設定[Modem]のUARTPortは正確に/dev/ttyAMA0を指定すること(誤ると起動エラー)DMRセクションはEnable=1とColorCode=1が基本[DMR Network]はEnable=0とし、受信専用とする
🖥️ 実行コマンド
$ nano MMDVM.ini
※ここに 全文の MMDVM.ini 設定 を貼り付けてください(既に共有済みの内容)
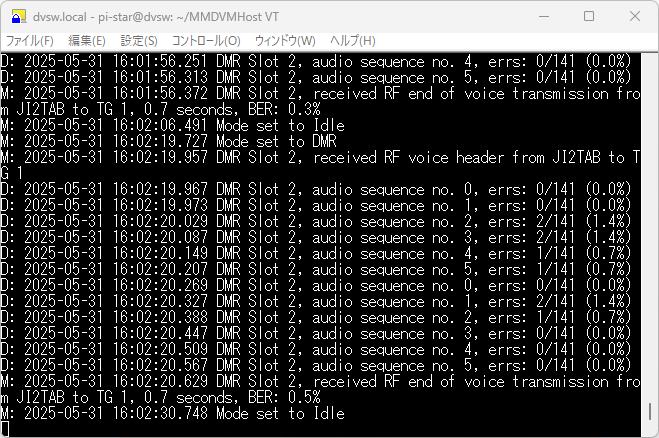
🚀【ステップ7】MMDVMHostの起動(テスト)
💡 解説
MMDVMHost を ini ファイル指定で起動し、ログに「received RF voice header」等が出力されれば、DMR信号の受信に成功しています。
🖥️ 実行コマンド
$ ./MMDVMHost MMDVM.ini
📋 起動メッセージ例(正常)
I: 2025-05-30 01:14:41.258 MMDVMHost-20250424 is starting
I: 2025-05-30 01:14:41.258 Callsign: JJ2YYK
I: 2025-05-30 01:14:41.259 Protocol: uart
I: 2025-05-30 01:14:41.260 UART Port: /dev/ttyAMA0
...
I: 2025-05-30 01:14:41.300 DMR Slot 2, received RF voice header from 4401378 to TG 9
このようなログが出れば、受信動作は成功です。
以上で、DMR受信専用のMMDVMHost構成が完了です。

- JJ2YYK
- 🆔 DMRを始める最初の一歩!「DMRID」を取ろう―――――――――――――――――― 2026年2月25日
- 📻 DMR無線機で、直接交信をしましょう 2026年2月23日
- 📡 DMRを、もっとシンプルに 2026年2月23日
- 【頒布のご案内】OpenCCVoice オリジナルプリント基板(数量限定) 2026年2月19日
- 【プロジェクト公開中】DMRデジピータ用 音声ID送出ユニット「OpenCCVoice」 2026年2月19日